智能系统未来不能只靠芯片的单独能力提升,更需要依靠系统能力的共同提升。
12月21日下午,学术沙龙第28期如期在线上举行。本期活动我们很荣幸地邀请到清华大学电子工程系长聘教授汪玉,为我们线上做了题为《资源受限下多智能体协同环境探索方法》的报告。

汪玉,清华大学电子工程系长聘教授、系主任,清华大学信息科学技术学院副院长,清华大学天津电子信息研究院院长,IEEE Fellow。
汪玉教授长期从事智能芯片、高能效电路与系统研究,ACM SIGDA执行委员会成员。共发表论文300余篇,谷歌学术引用近15000次。他先后获得中国计算机学会青竹奖、德国洪堡奖学金、国际设计自动化会议40岁以下杰出创新奖、CCF科学技术奖技术发明一等奖等荣誉。他还曾获得4次国际会议最佳论文奖,以及12次国际会议最佳论文奖提名。汪教授同时担任IEEE TCAD, ACM TODAES等期刊的编委,ASP-DAC 2025等国际会议技术委员会主席(TPC Chair)。
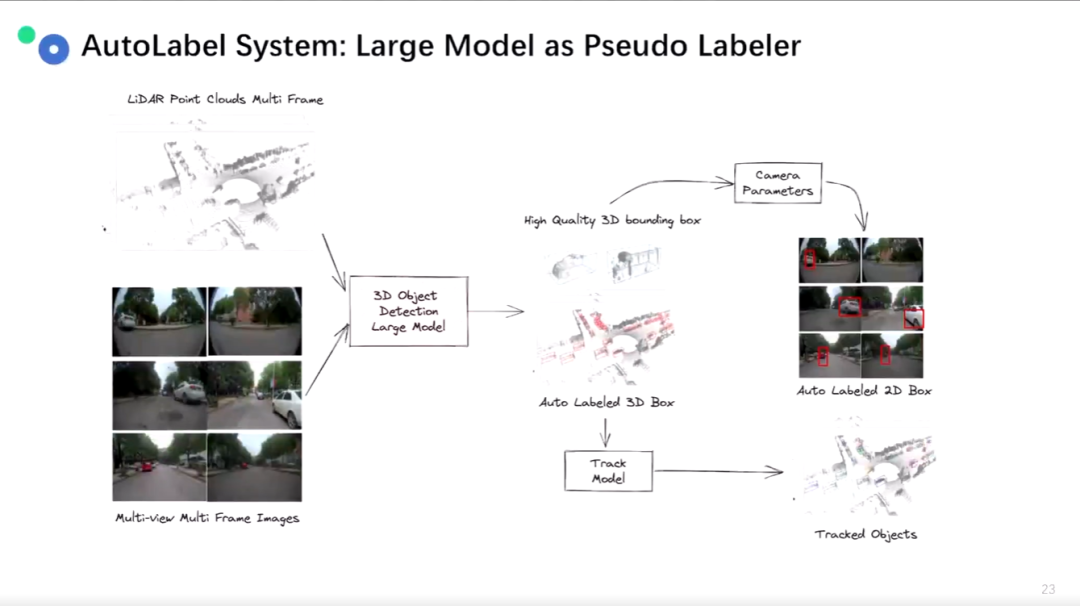
汪玉教授首先带我们回顾了人工智能算法与硬件的发展历程,并介绍了团队近几年在单体智能硬件系统设计方面的工作。随后,他详细介绍了团队在协同环境探索这一多智能体应用下,从通信受限和强化学习两个角度展开的探索与研究。最后,汪玉教授也介绍了未来关于构建涵盖任务定义、测试仿真、软硬件部署和实际环境验证等多个模块的协同智能开放平台的计划。
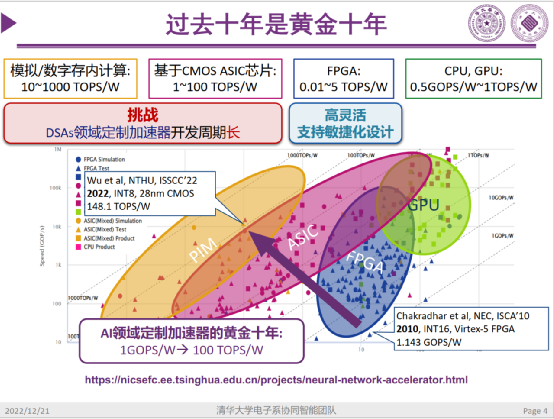
过去十年是AI领域定制加速器的黄金十年,新器件和新架构的发展为智能硬件能效
带来了5~6个数量级的提升。
汪玉教授团队在这一领域的发展中也做出了重要贡献,在神经网络加速器、模拟域存内计算架构等方向有诸多优秀的工作。
而面向未来十年,汪玉教授认为芯片的单独能力提升将会面临瓶颈,需要聚焦“芯片-系统”计算能力的共同提升。未来AI的发展呈现出大模型、多任务、稀疏化和动态网络等趋势。
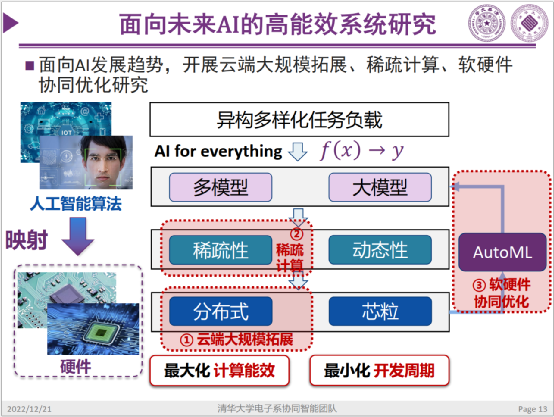
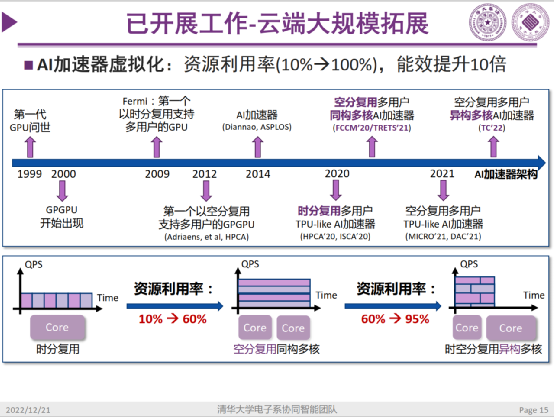
面向未来云端大规模拓展的趋势,汪玉教授团队采用时空分复用异构多核等方式将AI加速器虚拟化的资源利用率提升10倍。
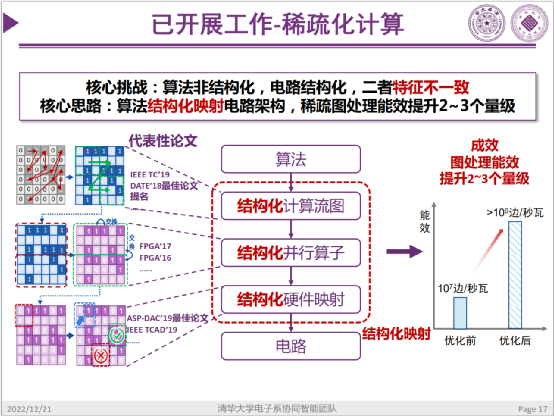
面向非结构化特征与稀疏计算的发展,汪玉教授团队通过软硬件协同优化方法,将算法结构化映射至电路架构上,使稀疏图处理能效提升2~3个量级,稀疏计算开源项目dgSPARSE已被多个开源框架集成。
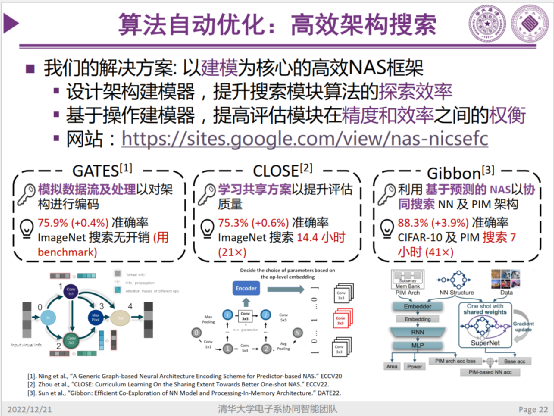
在模型设计方面,汪玉教授团队提出以建模为核心的高效NAS框架,可以在小时量级时间内实现算法模型架构的自动化设计。
尽管我们已经看到了单体智能的飞速发展,单体智能的能力却难以无限提高,当前的人工智能系统也正呈现出由单体向协同的发展趋势。
分布式协同系统作为协同系统的一种,不依赖中心节点控制,延迟与接入代价也更低,但面临着通信、感知、计算与数据等多种资源受限的问题。
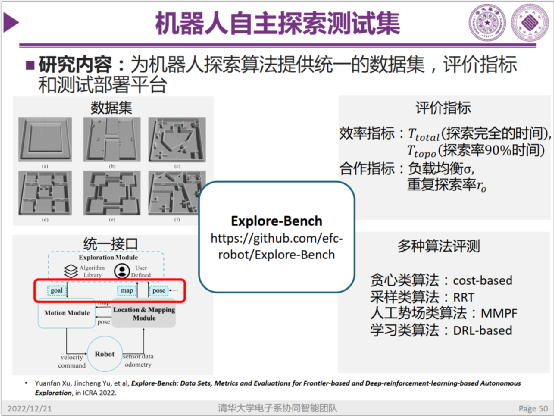
具体到定位与建图的应用中,要从单机拓展到多机,就要在多机之间共享场景描述子与定位信息等数据。而在实际场景下由于通信资源受限,就存在感知精度与通信量的权衡取舍。
汪玉教授团队提出仅在多机之间传输子地图,并以计算换通信、利用子地图完成场景识别与配准定位,从而在保证识别和配准精度的条件下减少了30%数据传输。
而在此基础上,考虑到不同无人平台对感知精度的需求不同,通过高数据效率的环境信息表示可以进一步降低通信量。基于GMM地图的多机环境探索相对3D点云可减少98%数据传输,而基于拓扑地图的多机环境探索相比2D栅格可减少90%数据传输。
除此之外,机器人自主探索测试集Explore-Bench也已开源。
在协同探索中,传统规
划方法往往存在短视与
非合作的问题。
强化学习因其具有建模复杂协同探索策略的能力,逐渐得到关注与发展。
但目前强化学习方法在多机探索中的应用尚不成熟,面临缺少
高效多机协同探索框架、可扩展性差和泛化性差等挑战。
为解决可扩展性差的问题,需要设计与智能体数量无关的策略。汪玉教授团队提出基于强化学习的可扩展多智能体协同探索框架MAANS,其基于输入维度可变的高阶特征完成动作规划,能够零样本泛化到其他智能体数量以及智能体中途上下线的情况,并能够产生比人工设计方法更优的合作策略。
团队还提出基于拓扑图的高泛化强化学习协同探索框架MANTP。
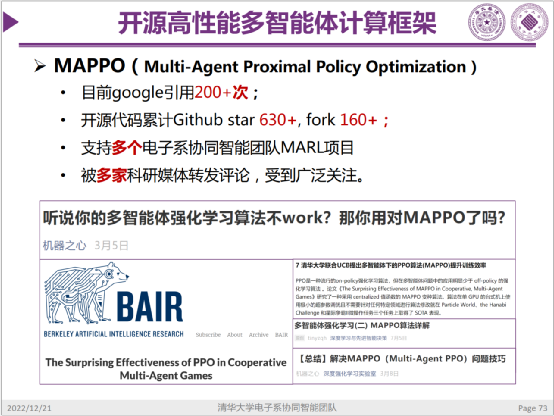
强化学习相关工作都基于课题组开源的高性能多智能体算法MAPPO,该工作的开源仓库是https://github.com/marlbenchmark/on-policy。
汪玉教授表示,未来还将建设协同智能开放平台,涵盖典型基础任务定义、测试集与仿真器、实际软硬件基础平台、实际任务测试验证环境以及数字孪生等多方面研究内容,并围绕智能无人系统构建公益课程、互动社区与实践赛事体系。汪玉教授也希望能够与大家一同探索,进一步提升多智能体协同系统的能效与各方面能力,推动其在真实应用场景中的落地。
文稿撰写 / 李翔宇
排版编辑 / 王影飘
校对责编 / 黄 妍
关注AIR公众号并回复“学术沙龙第28期”
即可下载完整PPT