11月10日晚, 第二期AIR DISCOVER青年企业家论坛如期举行。本活动有幸邀请到剑桥大学博士后高超,为我们线上做了题为From indoor localization to autonomous robots(从室内定位到自主机器人)的精彩报告。本次活动由清华大学智能产业研究院(AIR)周谷越副教授主持。

高超博士本科毕业于哈尔滨工业大学计算机系,随后进入英国剑桥大学计算机系师从Andrew Hopper教授、Robert Harle准教授(Reader)攻读计算机硕士、博士学位。主要从事全自主移动机器人相关领域的研究,包括基于无线信号、地磁场的室内定位与建图,基于激光、视觉等多传感器融合的同步定位与地图构建(Simultaneous Localization And Mapping)、三维复杂场景下机器人全地形三维建图、路径规划,多机器人协同探索等。博士毕业后留在英国剑桥大学计算机系担任博士后研究员,其研究成果发表于机器人、移动计算等领域顶尖国际会议、期刊。他的个人兴趣在于如何加速移动机器人走进人们的生产生活中并为社会服务。其毕业后曾创立机器人、辅助驾驶等领域科技公司,并获得剑桥大学、国际著名科技公司(ARM)创始人等投资。
本次报告中,高超博士分享了他本科,博士,创业三个不同的人生阶段的经历,重点讲述了他的室内定位的研究和之后在机器人领域的创业项目。最后他谈到了机器人未来的发展方向,并表示未来的机器人发展趋势一方面在于不断提高机器人的自主能力,另一方面在于让人的智慧与机器人的自主智能能够更好地结合,从而加速机器人在更多场景的落地。
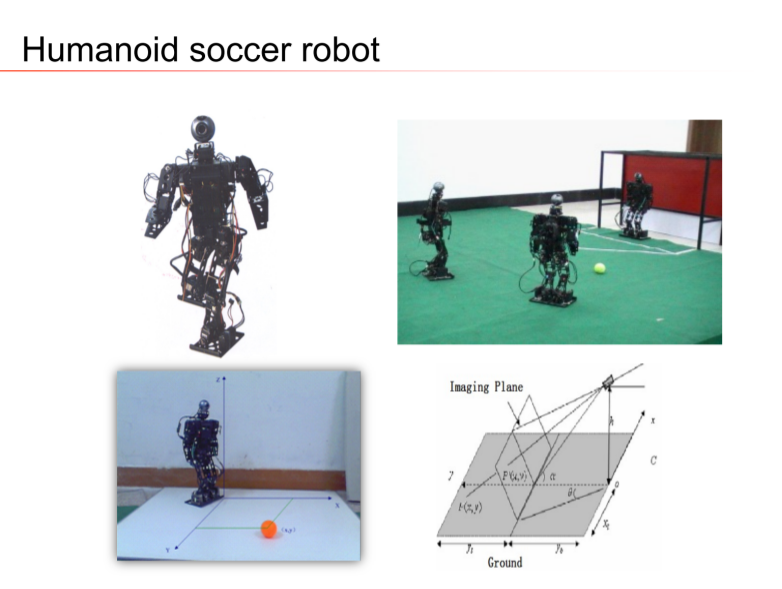
高博士在大学期间就参加了机器人足球等各类比赛,还多次获得了国内、国际冠军。在足球比赛中,他发现如何让机器人知道自己在场地中的位置是至关重要的问题,这也为他博士期间的研究打下了基础。
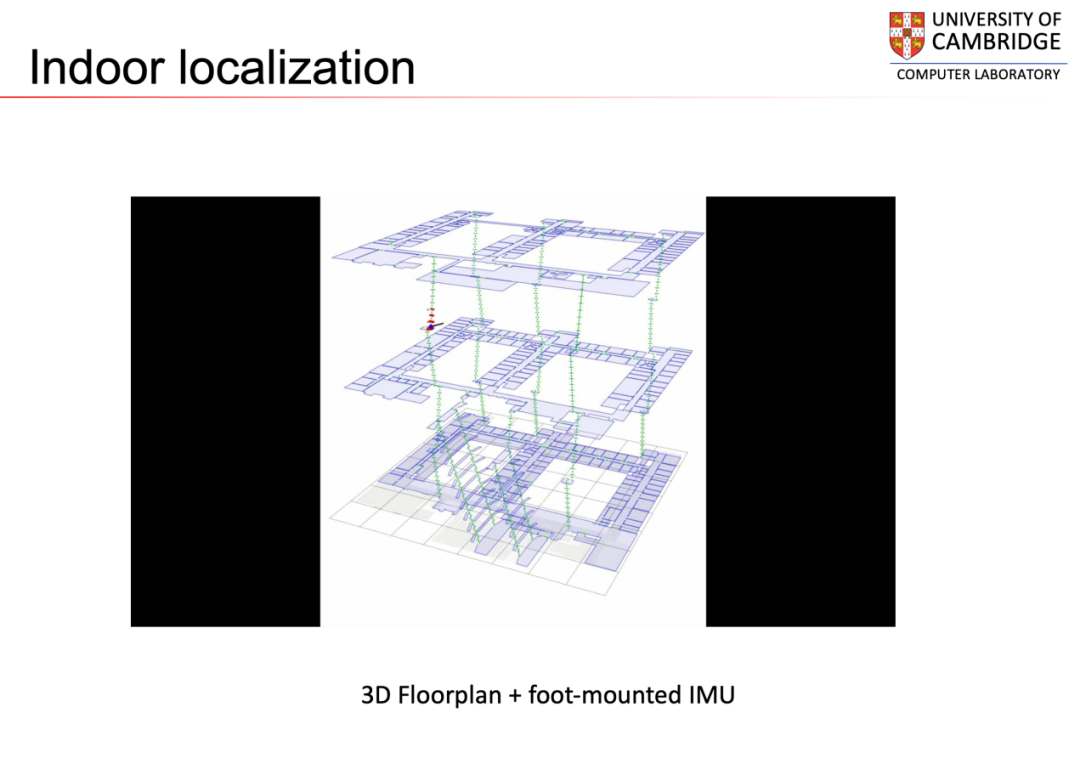
读博期间,高博士在室内定位领域进行了深入的研究。从实验室的早期工作中,高博士发现利用楼宇的三维结构信息和内嵌在鞋跟部的惯导传感器中的加速度、角速度信息,即可在楼宇中对人进行接近厘米级的定位追踪,但是这样的技术并不见规模化落地。因为在实际情况中,精确的楼宇三维结构图并不容易获得,同时在日常生活中在鞋跟部内嵌惯导传感器也不太现实。因此,高博士想到利用比较常见的楼宇二维平面图(如随处可见的消防疏散图)和手机中的消费级的惯导来解决这些问题,同样达到了接近厘米级的追踪精度。

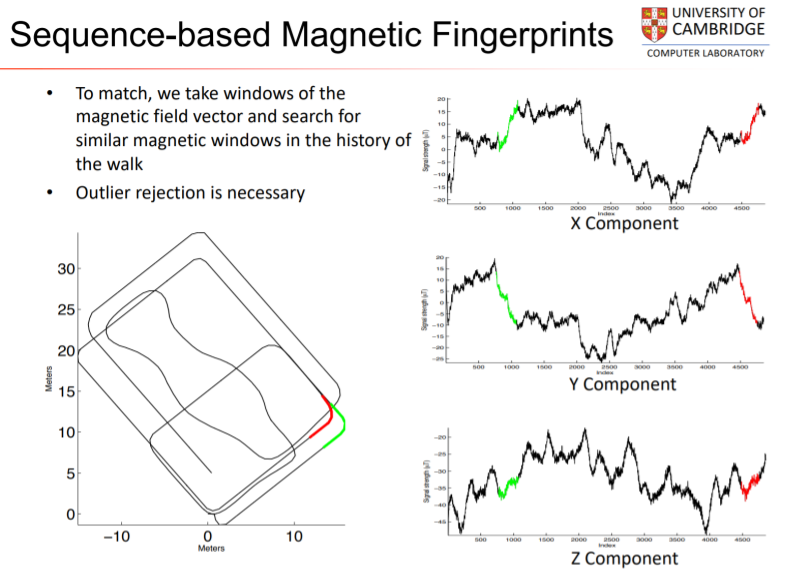
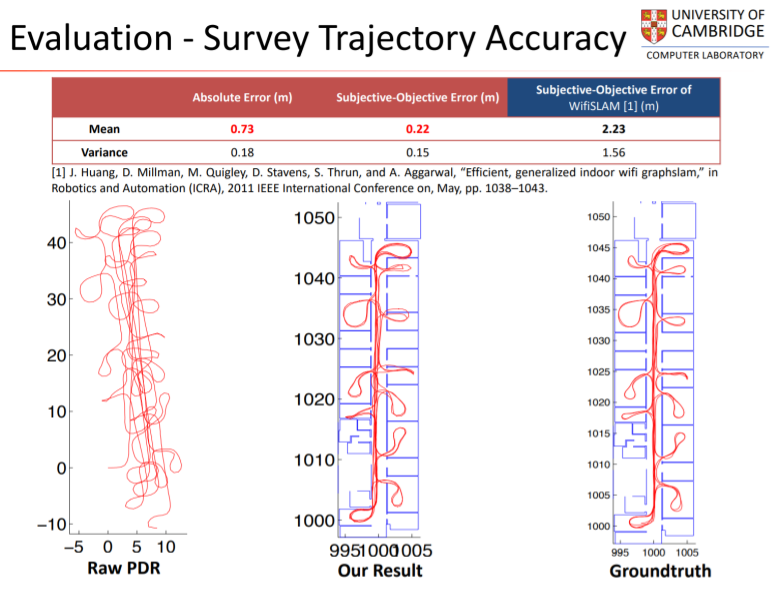
接下来,高博士探索了在完全没有楼宇结构信息的情况下,如何仅仅利用普通手机中的单个消费级惯导在室内对人进行定位追踪。然而由于消费级惯导的累积漂移误差等原因,得到的轨迹跟真实的轨迹相比存在很大的偏差。在研究过程中,他采用平时大家都忽略了的惯导的第三个输出——地磁场信息:室内环境的地磁场受金属结构等影响存在很大的扭曲,但是在人重复走过同一段路时,地磁场波形的变化是高度重复的。利用室内地磁场的这一特性,通过所开发的波形匹配算法,能够找到地磁场信号序列中波形匹配的部分,用这些信息来检测行走轨迹中的“回环”,进而修正人在室内的行走轨迹。仅仅利用一部手机中的消费级惯导,这项工作就实现了对人在室内行走轨迹的接近厘米级的追踪,与当时基于其它类型无线信号的SOTA相比,室内定位的精度有10倍的提升。
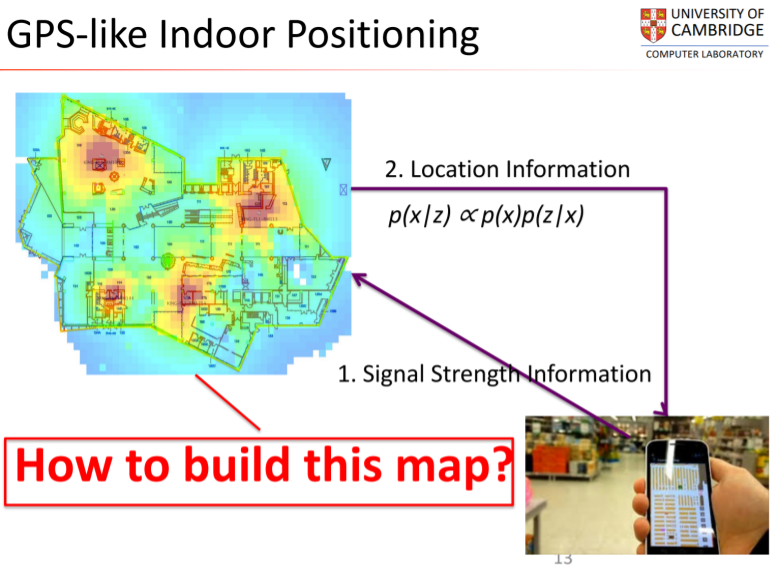
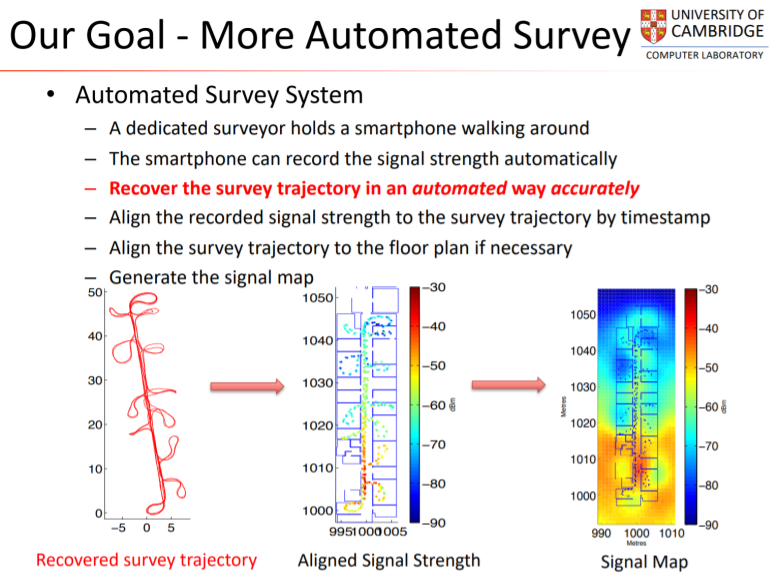
下一步,高博士又研究了如何在大规模室内环境中高效地部署类似GPS的室内定位系统。部署该系统的关键是建立室内无线信号分布图。传统的建图方法是人工手动标注室内不同位置的信号强度。但是在大规模复杂室内场景中手工标注的成本很高,也存在很大的误差。高博士利用之前工作中的高精度轨迹还原方法,让建图人员在室内行走的过程中记录沿途手机接收到的信号强度。在精确还原人在室内行走轨迹的同时也得到了室内的无线信号的强度分布。在几千平的商场中,仅需要几分钟就能生成这样的室内信号分布图,极大地降低了无线信号地图的构建与维护成本。
从剑桥毕业之后,高博士开始了在机器人方面的创业之路。他从电脑游戏中得到了启发,在游戏中仅需要一个鼠标和一些简单的操作就可以控制不同种类的机器人完成不同的任务。如果在现实世界中,我们能够利用类似游戏化的操控方式来操控机器人,结合人类的智慧和机器人的自主能力,我们就可以用人和机器的混合智能完成更加复杂的任务。

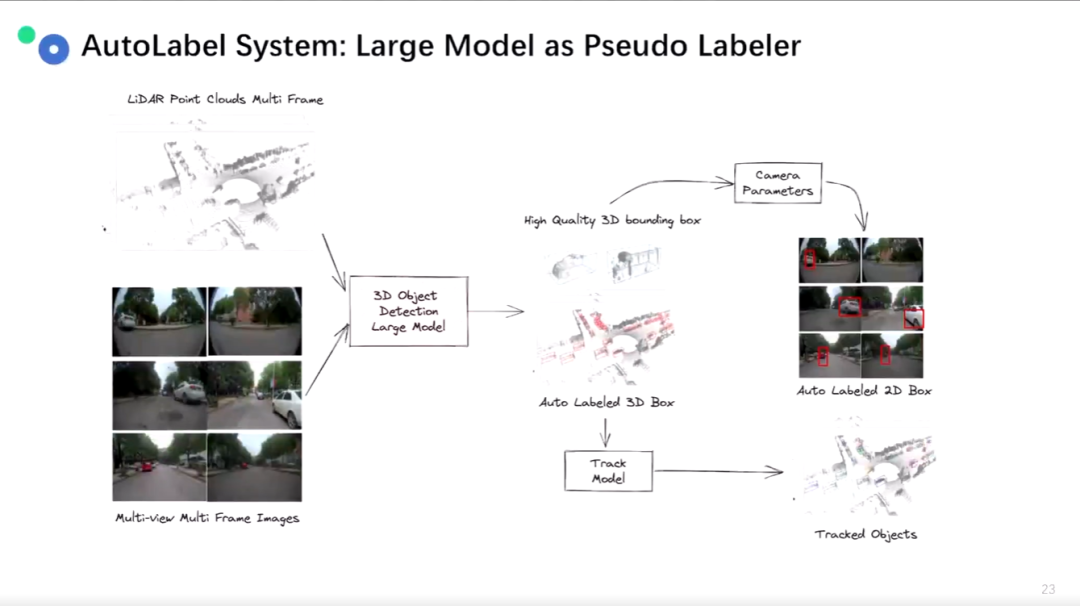
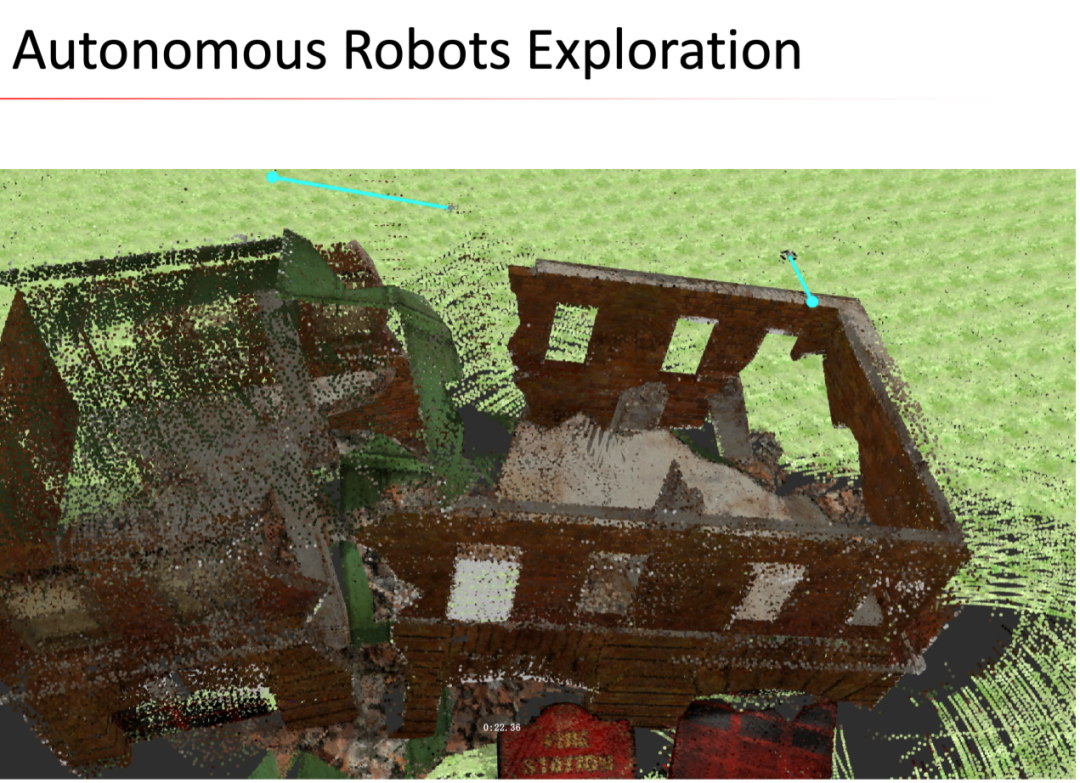
在实验中,搭载激光雷达、摄像头、惯导等多传感器的机器人在空间中运动,算法就可以实时构建出高精度的场景三维模型,并且可以推断出机器人在环境中的六位姿态。在这种游戏化的机器人操控界面中,我们可以看到远程环境的高保真三维实时场景以及机器人在场景中的位置和姿态;操控人员可以对机器人下达行为级或者任务级的操控,如click and go、未知区域的自动探索等,并且在仿真与真实环境中都对该系统进行了验证。

在最后的问答环节中,高博士与线上线下与会的老师和同学们对报告中涉及的问题进行了详细地解答,并对机器人产业未来发展方向展开了激烈的探讨。