任务输入:车端数据(图像、点云)、路端数据(图像、点云),以及对应的时间戳和标定文件;
任务输出:车端感兴趣区域内的障碍物目标 3D 位置、朝向等。
扫码入群参与更多赛事交流
上一条:AIR新星|向着群山之巅出发! 下一条:AIR 夏令营圆满收官!
【关闭】
热烈祝贺陈博远同学荣获2025清华特奖!12月18日,2025年清华大学本科生特等奖学获奖名单正式公布,全校共10人入选,行健书院2022级本科生陈博远同学在众多候选人中脱颖而出,获得该荣誉。自2023年加入AIR开展科研以来,陈博远同学以第一或第二作者身份在计算机视觉、机器人领域国际会议中发表5篇论文,获得国家自然科学基金青年学生项目资助。未来他将推荐免试至AIR攻读博士学位,导师为张亚勤院士。个人简介陈博远,清华大学行...
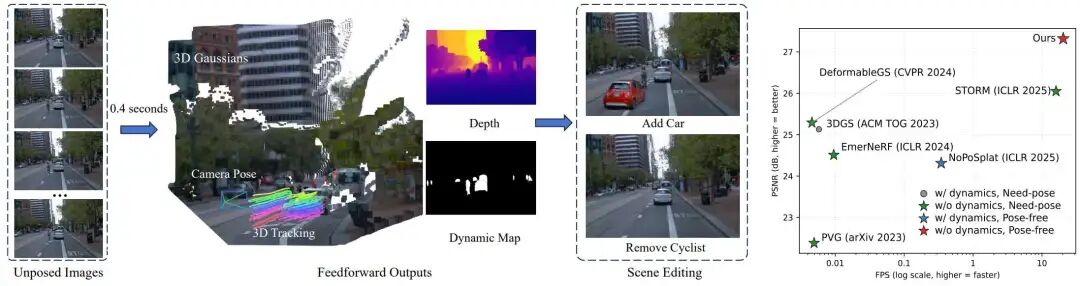
清华大学智能产业研究院(AIR)青年教师赵昊课题组联合小米汽车等单位,推出了首个面向大型动态驾驶场景的无姿态(pose-free) 前馈三维重建框架——DGGT(Driving Gaussian Grounded Transformer)。该方法摆脱了传统依赖逐场景优化、相机标定以及短帧窗口的限制,能够直接从稀疏、无标定图像中重建长序列三维场景,使自动驾驶仿真迈向高速、可扩展的新阶段。近年来,多模态大模型(MLLMs)发展迅猛,从看图说话到视频理解,...
从生成式人工智能(AIGC)到智能体AI(Agentic AI),AI发展正经历深刻的范式转变。12月5日晚,中国工程院外籍院士、清华大学智能产业研究院(AIR)创始院长张亚勤教授,在人文清华讲坛发表题为《人工智能:无尽的前沿》的演讲,他指出 AI作为核心驱动力,正以前所未有的速度重构生产力与生产关系,并推动物理世界、数字世界乃至生物世界的深度融合。中国AI发展迅速,有望成为第四次工业革命的领军者。线上线下近350万观众跟随...
业务合作:airoffice@air.tsinghua.edu.cn招生招聘:airhr@air.tsinghua.edu.cn 联系电话:(010)82151160
办公地点:北京市海淀区清华科技园启迪科技大厦C座12层
京ICP备15006448号 | 版权所有©清华大学智能产业研究院