2022年5月至9月,由
AIR DISCOVER Lab 主办的夏令营
在清华大学智能产业研究院(AIR)成功举办。
此次夏令营吸引了来自国内外高校的42名优秀同学,在AIR青年导师和科研工程师的带领下,完成了高强度、沉浸式的科研和工程体验,在机器人领域、计算机视觉领域、人机交互领域开展研究与探索。
在机器人领域,同学们完成了基于行人意图的对抗轨迹生成、基于高精度地图的无人机SLAM、移动机器人的物体抛接系统、足式机器人的运动控制系统等优秀项目;在计算机视觉领域,同学们完成了基于行人意图的对抗轨迹生成、在线结构化室内三维场景重建和理解、弱监督的物体可供性学习框架、基于注意力机制的自监督的超像素和边缘提取等优秀项目;在人机交互领域,同学们完成了面向盲人的智能导航机器人、基于柔性传感的机器人情感交互、AI音乐疗愈系统及智能乐器、智能服装及主动健康管理系统、儿童情绪教育智能积木套件、人机共驾的自动驾驶交互系统等优秀项目(项目排名不分先后)。
本次夏令营成果答辩与2022年10月举行,此次活动邀请了清华大学交叉信息研究院助理教授戈力博士、清华交叉信息研究院助理教授赵行博士、北京大学人工智能研究院助理教授朱毅鑫博士、北京大学前沿计算研究中心助理教授王鹤博士(排名不分先后)作为答辩评委,为夏令营同学们的科研成果进行打分。
最终,刘明道同学以平均分24分夺得第一名,王璐瑶同学以平均分23.
5分夺得第二名,曹岩宸、高焕昂、许少聪同学以平均分23.25分并列第三名。
Unsupervised Road Anomaly Detection with Language Anchors
刘明道
指导老师:赵昊,李鹏飞
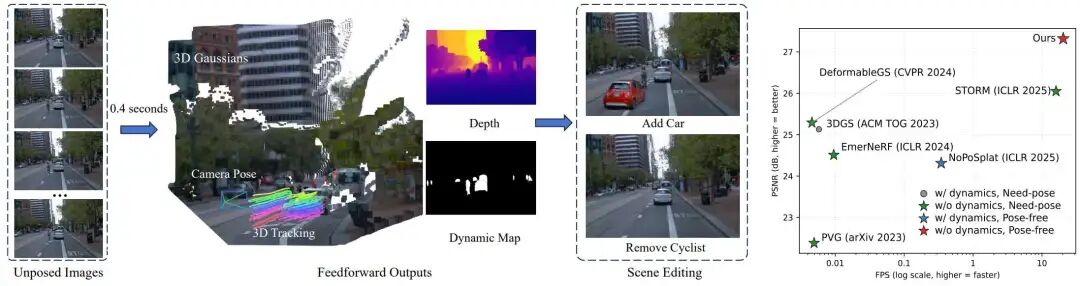
道路场景下的异常检测对自动驾驶等机器人任务至关重要。许多语义分割网络基于给定数据集进行训练,无法辨识异常物体,而收集丰富的异常数据进行训练也存在一定困难。本项目使用大型视觉 - 语言预训练模型提供的语义空间训练模型的语义分割,同时采用一种新的 Anomaly Score 计算方式,提升了模型在无监督场景下异常检测的准确率和鲁棒性。

盲人和低视力(BLV)群体的出行引导问题正日渐成为人机交互领域的研究热点。智能导盲机器人能够在引导时提供完全或部分的自主权。然而,BLV对该类机器人的自主权偏好、不同机器形态的优缺点仍然有待探索。项目小分队在龚江涛老师的指导下,设计开发了两种不同形态的可切换自主性的智能导盲机器人,邀请十余名BLV被试参与了实验室研究和实地研究。本项目为BLV群体感知不同的自主权和机器形态提供了经验证据,为未来辅助型机器人的设计提供参考。
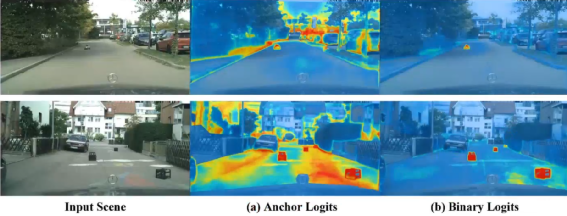
Enable Natural Tactile Interaction for Robot Dog based on Large-format Distributed Flexible Pressure Sensors
曹岩宸
指导老师:龚江涛
基于柔性压力传感的自然触觉交互
情感触摸在人机交互中扮演着重要的角色。在本研究中,我们提出了一种基于大型分布式柔性压力传感器的仿生四足机器人的数据驱动情感计算系统,该系统可以模拟人与宠物狗之间的自然触觉交互。我们收集了26个参与者的208分钟视频,构建了1212个人的手势-狗的动作交互序列数据集。数据集通过文献、问卷、观察等方法,手工标注了81个触觉手势标签和44个相应的狗的反应标签。为了识别这81种手势并预测狗的反应,我们提出了一种基于ResNet的手势分类算法和基于Transformer的动作预测算法的深度学习算法流水线,分别实现了99.1%的分类准确率和0.87的1-gram BLEU评分。结果表明,触觉交互在缓解用户焦虑、激发用户兴奋和提高机器狗接受度方面发挥着更为显著的作用。
From Semi-supervised to Omni-supervised Room Layout Estimation Using Point Clouds
高焕昂
指导老师:赵昊,田倍闻
我们尝试将半监督学习领域基于一致性的方法和基于伪标签的方法融合,提供了一个在半监督设定下能够利用无标注的数据提升室内场景框架估计任务性能的算法框架。我们相信,机器人的未来必将是集体智能,我们的框架则适用了这种情况,是利用大量无标注数据提升机器人理解能力的初步尝试。
Fine-grained Edge Detection with Learned Cause Tokens
许少聪
指导老师:赵昊,陈小雪
项目方案框架
不同原因导致的不同边缘对机器人感知尤为重要: 反射边缘帮助机器人了解纹理复杂的地形从而辅助其作出决策,光照边缘帮助机器人识别阴影和真实障碍物,方向边缘帮助机器人识别场景布局,深度边缘帮助机器人感知物体遮挡关系。因此本工作通过提出先检查边缘而后检测不同原因导致的精细边缘的两阶段边缘检测器,并同一个four-to-one constraint loss 约束两阶段检测。此外,我们将边缘形成的原因建模成了四个可学习的向量. 实验证明我们方法非常有效,各个精细边缘检测任务上均超过SOTA,特别是光照边缘,超过SOTA 14.5个点。
本次答辩评分标准共分三个维度,每个维度各10分,总分30分:
• 研究意义与价值:研究具有科研价值、实用价值和现实意义
• 研究创新性:研究方法以及问题解决方案具有创新性
• 研究完整性与工作量:研究完整性以及难易程度、完成研究所需的工作量
获奖同学得分详情如下:

夏令营组委会对结果具有最终解释权,如有建议可发送邮件至:discover@air.tsinghua.edu.cn
刚来到 AIR 时是个纯纯小白,夏令营中动手完成的第一次 Research 让我的能力有了很大提升;AIR 夏令营为我打开了 CV 的窗,点燃了我对 CV 的热情。
—— 刘明道 清华大学
本次夏令营=全流程反复论证探讨+多学科思维交叉碰撞+人机交互燃起来了+被龚老师carry的安全感+直面BLV群体的宝贵体验+研究视角下的同情心同理心+实验做到凌晨的四环疾驰+研昂鹤瑶小分队的革命友谊……真的很赞!
—— 王璐瑶 东南大学
真的很开心,神仙实验组和神仙导师们!
感谢 AIR 的夏令营让我接触到了宝贵的科研训练的机会。对于想接触科研的同学,来 AIR 是正确选择!
非常开心在这里认识了很多非常努力的小伙伴和很负责的导师,自己学到了很多!
AIR DISCOVER LAB 冬令营即将开启!
冬令营将继续围绕AIR和DISCOVER Lab的核心科研主张,在机器人、计算机视觉、和人机交互领域,围绕人才培养、科研攻关、赋能产业三个核心目标进行科技前沿探索,旨在将成果快速应用于智能交通、绿色计算、先进制造、智慧医疗等领域,促进社会产业发展。欢迎有兴趣的同学们报名参加AIR DISCOVER 2022 冬令营活动!
DISCOVER实验室是AIR科研方向的横向支撑实验室之一,旨在利用机器学习、计算机视觉、计算机图形学、机器人学、运筹学、高性能计算与人机交互等前沿技术,围绕车路协同(V2I)、用户直连制造(C2M)、实验室自动化等各应用场景,构建以感知、规划、控制与决策为核心的智能算法平台体系,结合涵盖设计、工艺、计算与人因的智能系统架构体系,研究人-机-边-云四位一体的人在环路多智能体协同系统,开展具有创新性的算法理论与系统架构研究,紧贴以制造业为主的国家重点行业需求,攻克以人为中心的场景理解、人在环路机器学习、仿真到现实迁移与柔性制造工艺等关键技术瓶颈,与产业界深入合作探索自动驾驶与柔性制造的范式转移路径并实现关键技术验证与落地,推动我国在智慧交通和智能制造领域的产业升级。