相信大家已经在刚才的冬奥开幕式上,领略到了无人机灯光表演的风采,由2022架无人机组成的“冰墩墩”和“雪容融”缓缓升起,冬奥主题跃然夜空中。近年来,无人机灯光秀逐渐成为流行的大型活动表演节目,似乎有替代传统烟花表演的势头。相比烟花表演,它具有环保、成本低廉、可控性强、以及视觉震撼等多种优势。在这篇文章中,AIR将会深度介绍这一新型数字艺术表演系统及其技术原理。

图源:央视冬奥会开幕式直播画面
无人机灯光秀简介
无人机灯光表演最早产生于2016年。苏黎世联邦理工大学的教授 Raffaello D'Andrea (也是Kiva System创始人) 在TED演讲台上进行了微型无人机集群表演,一夜之间吸引了无数目光。在此之后, 后来者更是将无人机灯光艺术推向极致,出现了一系列加入真人舞蹈的数字艺术表演。

TED 集群表演
6年时间过去,随着消费级无人机市场的持续扩大以及其行业应用日趋成熟,无人机领域的技术成熟度已经今非昔比,具体表现在:开源的飞控软件已经能应对大部分突发外部扰动,处理大部分内部问题;而更强大的状态估计算法不仅能估计飞机自身物理状态,还能估计外部扰动的精确状态;成熟的软件仿真系统能代替实体飞机,进行虚拟环境中的测试;不仅如此,传感器的精度也提升到了更高的水平,从而支持对飞机状态进行更加精确的估计;此外,动力系统相比于以前具备了更高的控制精度和能量利用率。
在这些基础构件的进步之上,很多人以跨领域的技术努力为我们带来了最终能大范围生产和普及的大规模无人机集群表演系统,使无人机灯光秀走出了TED演讲厅。
以国外的 Drone Show Software (DSS) 为例,此系统能够控制上百架无人机按照事先设计好的三维动画精确运动,并在百米高空精准呈现出事先设计的动画效果。
DSS 无人机表演
国外类似的无人机表演组团队还有 Intel 、Skymagic;国内也有大漠大、千机科技、空中未来等等。其中大漠大还在2020年刷新了全球最大规模无人机编队的吉尼斯世界纪录。
大漠大无人机表演
无人机灯光秀的部署流程
如此壮观的表演是如何开始的呢?在设计阶段,节目制作人员会将需要表演的形状、文字、动态过程以三维动画的形式制作出来。这些用于空中表演的3D动画和普通3D动画没有本质区别,主要的不同在于3D表演动画需要考虑从各个角度观看的观赏性。
DSS用于空中表演的3D动画
动画创建完成后,软件会通过算法为数百架无人机生成单独的飞行轨迹,进入模拟飞行阶段。这个阶段被称作“软件在环仿真” (SITL)。软件会为数百架仿真飞机逐一加载飞行路线,让无人机集群在模拟环境中表演,以测试上一阶段生成的路线是否能够被执行。在这个阶段发现任何问题都会及时纠正,如某些奇怪的飞行动作受到物理限制(例如,飞行加速度在物理条件下无法达到)或者会导致飞机相撞。
软件在环仿真(SITL)示意图
下一步是在地面站软件中设置好地理围栏(防止无人机由于突发状况跑到安全区域之外),之后就可以进行现场部署了。
操作人员需要带以下设备到现场:RTK-GPS基站、地面站计算机、WIFI、以及无人机集群。现场部署的第一步通常是测量场地位置并决定朝向,这一过程需要用到高精度的差分GPS基站,从而为无人机集群建立基准坐标系。架设好WIFI后,则需要为每架飞机测试通讯链路来确保链接正常,以及检查电池水平等。
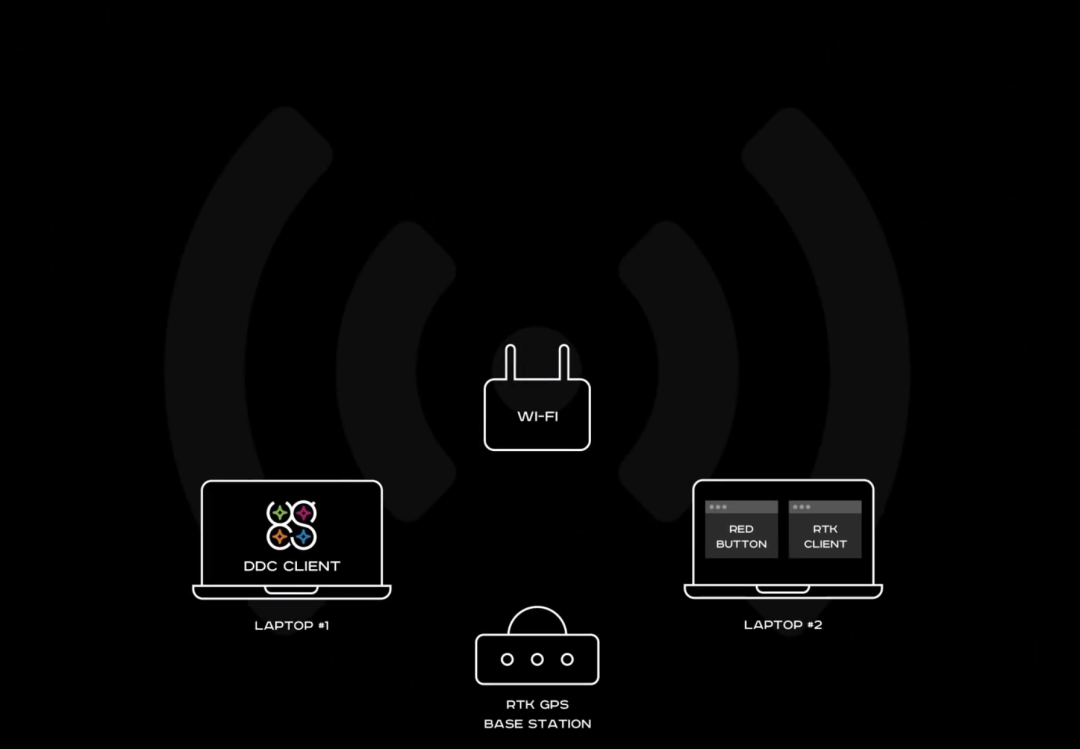
现场设备图例

部署RTK-GPS基站示意图
同时,表演场地中用于起降的地面也有讲究。若要保证飞机正常起飞和降落,那么所选地面便不能有太厚的积雪或高度超过无人机螺旋桨的杂草。
一切就绪后,地面站软件会将事先计算好的飞行轨迹通过 WIFI 逐个上传到数百架无人机上,这个过程会花费一定的时间。
上传无人机飞行预设轨迹
地面站软件会为集群设置好开始和结束表演的时间点,剩下的一切流程都已自动化,地面人员只需等集群表演完成后飞回即可。
灯光秀背后的原理
跨越多个领域的技术支撑了上述成熟、大规模、可重复的高精度集群表演。
动画制作完成后,算法会根据3D动画的每一帧计算每架飞机在每秒应该出现的位置,这样便可为每架飞机生成一条“位置-时间”轨迹。这条轨迹称之为时空约束。根据时空约束,算法可计算出一条空间中对时间连续可导的多项式曲线(通常要求7阶可导)方程,而这条光滑的曲线就是飞机最终要走出的轨迹。由于这条轨迹的高阶可导特性,我们可通过它计算出飞机在任何一个时刻的位置、速度和加速度,从而最终确定每架飞机在表演过程中的任意时刻所需要的螺旋桨推力、角加速度等控制参数。
以数学语言描述出的精确轨迹通常也需要专门的控制算法,我们称之为“轨迹跟随模块“,主要用于确保无人机严格遵循轨迹飞行。这样就能保证即使在大风及扰流的不确定环境中,无人机也能飞出精确的阵型。
轨迹解算示意图
当然,要想让数百架飞机同步执行各自设计好的动作,没有时间同步是不行的。如果某几架飞机的执行动作相比其他飞机落后或提前了几秒,不但可以被人一眼看穿,还可能引起飞机间的撞击事故。这就要用到互联网服务器之间的NTP时间校准算法了。这一算法通过局域网内部互相喊话的机制将自己的时间戳告知对方,得到对方时间后立马对自己的时间进行一定调整,并在多轮调整后让所有节点的时间戳逐渐趋向于一致。
经过这样数轮的“喊话”,数百架无人机的时间戳可以同步到10毫秒的精度范围内,达到起飞前的真正就绪状态。所有动作一触即发。
然而,在飞机到达数百米高空后,由于高空风速较大和不确定扰流的存在,有时候不免会出现飞机间距离过近的情况。这时,为了减小碰撞的概率,必须有一种防止碰撞的算法介入。通常,此种情况下采用最多的是人工势场法:它将节点建模成一个电荷,节点与节点之间的作用力服从电荷间作用力;将这个作用力计算出来,和当前轨迹所指示的控制量合并,就能让飞机在尽量贴近预先设计轨迹的情况下飞行,又不至于撞到别的飞机。
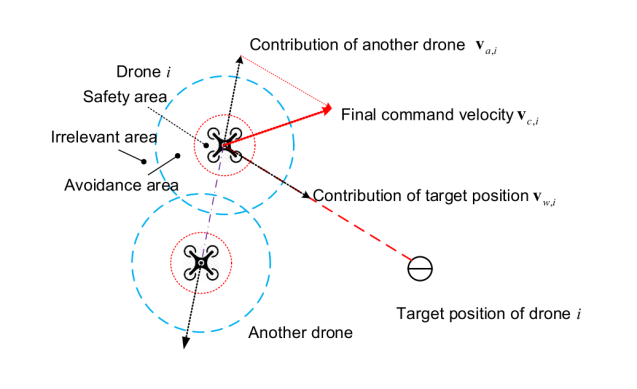
人工势场示意图
在集群表演过程中,地面站计算机屏幕能时刻监控整个集群的飞机,掌握其当前位置、速度、电量等状态。此时,操作者可以通过屏幕将整个集群的状态一览无遗。然而,我们普通的家用 WIFI 在接入几十个设备后就会出现卡顿、数据阻塞的现象,集群系统中数百架飞机是如何避免无线电信道干扰的呢?这就不得不提到一种名为“令牌环网”的机制。我们看到的无人机动作整齐划一,好像同时受到控制一样。其实,在一个极短的时间段里,只有一架无人机在跟电脑进行通信。它们好像在和电脑玩一个“击鼓传花”的游戏,而这个花就是“令牌”。每架无人机收到数据后都会判断是不是自己的数据,如果是就收下“令牌”,否则就丢给其他兄弟。同一时刻只有拿到“令牌”的无人机有权跟电脑通信,其他无人机则处于待命状态。
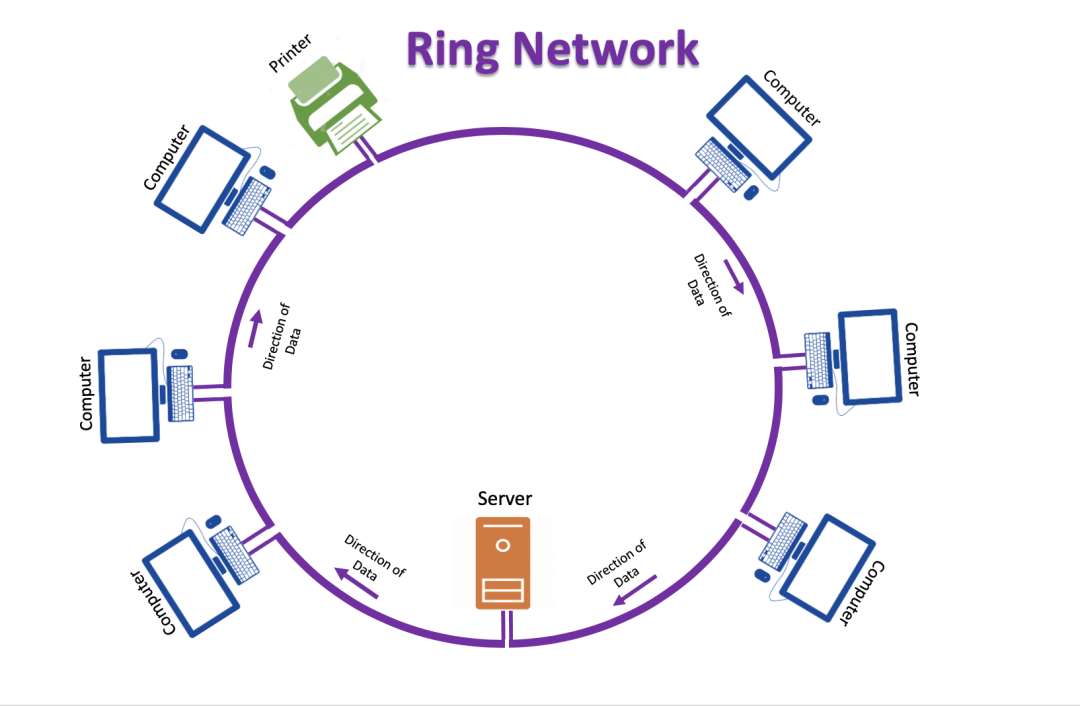
令牌环网机制示意图
在这些技术的共同加持下,无人机编队表演进入了实用阶段。持续进行的技术优化不仅降低了事故率,还同时提升了视觉观感,使得目前的编队表演从效果上已经能与全息投影媲美了。
展望未来
飞行安全是所有无人机编队表演的基础,时有发生的无人机坠落事故一直是相关行业从业者的“心病”。无人系统安全是AIR重点关注的研究方向之一,AIR周谷越教授曾在大疆创新(DJI)带领团队推出了全球首款支持编队飞行功能的消费类无人机,并在全球首份车路协同白皮书中论证了车路协同自动驾驶的安全性。目前,由周教授牵头成立的AIR协同视觉与机器人实验室(DISCOVER Lab)正在与行业头部企业合作,持续进行包括无人机在内的未来交通系统的安全论证。

可以在室内安全编队飞行的消费类无人机
与此同时,学术界也在探索新的技术架构,试图让无人机集群变得更灵活,从而减少更多依赖条件并提高对意外灾害的抵抗能力。这些努力都围着绕一个核心进行,即分布式架构。例如,研究人员通过视觉SLAM结合UWB测据的方式在某些系统中剥离了GPS系统,让无人机集群在没有GPS信号的室内也能知道自己和彼此的位置,从而降低RTK-GPS地面站异常可能导致的集群失控风险。
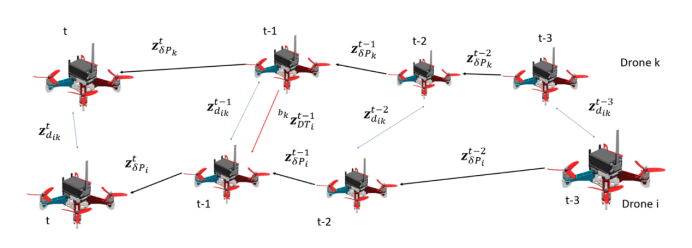
UWB+SLAM 示意图
也有其他研究者尝试将指令分发系统从总-分式结构向无中心节点式结构改变,旨在让整个集群摆脱与地面站之间通信的痛苦。
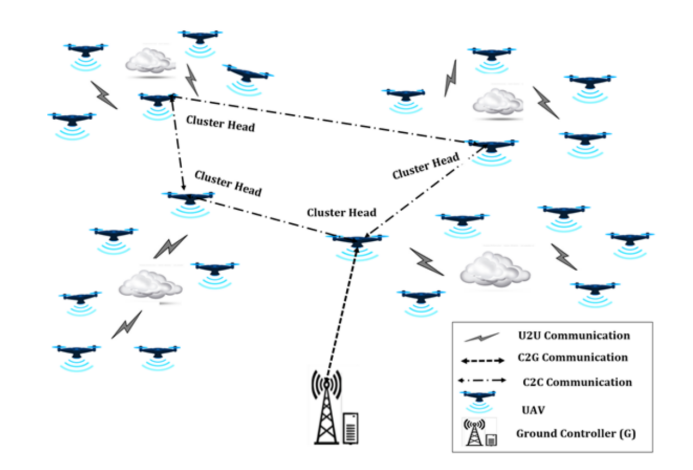
分布式决策网络
为了达到真正绝对的安全,除了避免系统内部的问题对整体可靠性带来影响外,还必须能抵御外界因素对无人机集群带来的不可预测的干扰,例如鸟类等飞行物的主动撞击、忽然出现在飞行路径上的障碍地形等。正因如此,集群中的动态避障也是学术界非常关注的核心方向之一。

无人机动态避障
在不久的将来,我们会看到一类全新的无人机表演:无需提前勘测场地,无需依赖地面人员的复杂操作,更不会由于基础设备出问题而整体炸机,并且能避障将飞行的危险性降至最低。这样安全并且强大的无人机系统也会得到更多领域的更广泛应用。
阅读原文:
冬奥夜空新科技:AIR带你探秘无人机表演背后的技术