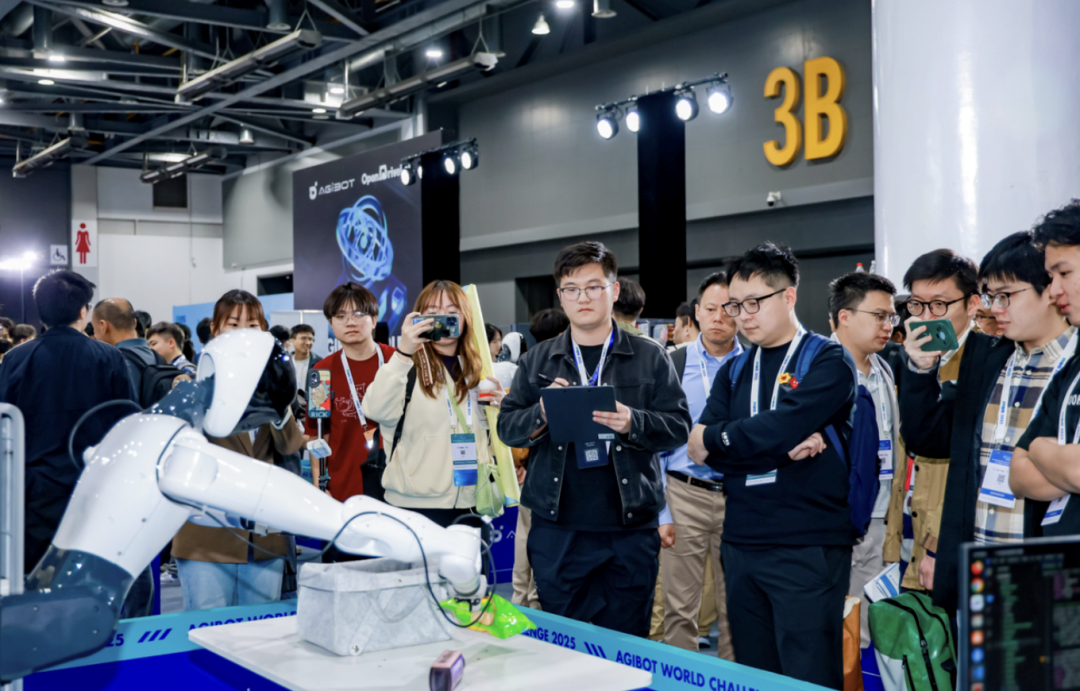
2025年10月20-23日,清华大学智能产业研究院(AIR)与上海人工智能实验室(Shanghai AI Lab)联合组队参加了在杭州举办的 IROS 2025 AGIBOT World Challenge 国际具身智能竞赛,并荣获冠军。
IROS是机器人领域的顶级国际学术会议,IROS-2025举办的AGIBOT World Challenge吸引了来自全球五大洲、23个国家/地区的431支顶尖战队参赛。经过线上赛的层层筛选,最终有11支最具竞争力的队伍进入 IROS 杭州现场的 Manipulation 赛道。参赛队伍需在抓取并打包桌面物品,抓取并打包传送带物品,倒水,挂置货架物品,叠衣服,使用微波炉加热物品六大真实物理任务中展开角逐。比赛全面考察了参赛模型在指令跟随、动态实时响应、精细化操作以及超长程操作等方面的能力,对具身智能模型在真实复杂环境中的实用性、鲁棒性及泛化性提出了极高的要求。

AIR-上海AI Lab联合组成的AIR-DREAM团队基于自研的X-VLA创新具身智能模型架构,在一系列跨任务、跨场景真实复杂物理操作中展现出卓越的任务执行性能、鲁棒性及泛化能力,最终脱颖而出,获得全球第一名。
本次参赛的AIR-DREAM 团队由清华大学智能产业研究院詹仙园副教授与上海人工智能实验室王泰研究员联合指导,团队成员包括:AIR-上海人工智能实验室联合培养博士生郑金亮,AIR博士生李健雄、郑一楠,AIR实习生刘东岫、冯钰淳、王志豪。此外,团队还得到了北京智源研究院王鹏伟研究员团队的大力支持。


赛后,比赛前三名的队伍分享了各自的技术路线与心得,AIR-DREAM队伍上台分享了基于X-VLA的技术路线,受到了广泛关注。

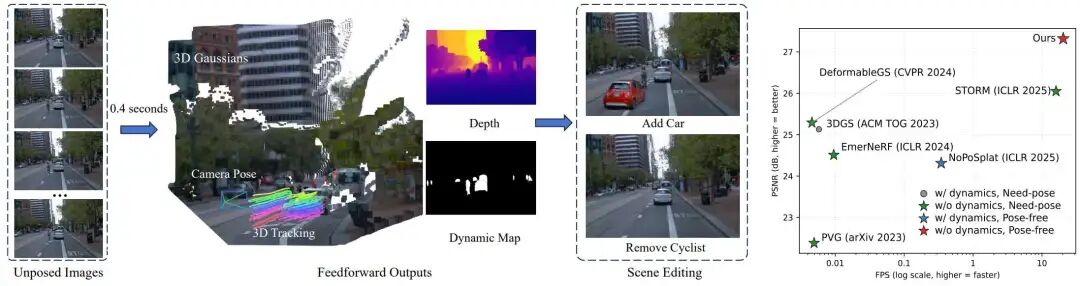
X-VLA是一种高扩展、简洁的通用视觉-语言-动作(VLA)模型,它通过为每个机器人平台引入实体特定的可学习软提示(Soft Prompts)来有效解决跨实体、异构机器人数据的学习难题。同时X-VLA是首个实现120min无辅助自主叠衣任务的全开源具身VLA大模型(公开数据、代码与参数),以仅0.9B的参数量在五大权威仿真基准上全面刷新性能纪录,为具身智能领域提供了一个性能强劲、完全开源的新基线与技术范式。详细技术细节参见以下项目主页。
•项目主页:https://thu-air-dream.github.io/X-VLA/
•代码:https://github.com/2toinf/X-VLA.git
•作者:Jinliang Zheng*, Jianxiong Li*, Zhihao Wang, Dongxiu Liu, Xirui Kang, Yuchun Feng, Yinan Zheng, Jiayin Zou, Yilun Chen, Jia Zeng, Ya-Qin Zhang, Jiangmiao Pang, Jingjing Liu, Tai Wang, Xianyuan Zhan

IROS(IEEE/RSJ 国际智能机器人与系统会议)是由 IEEE 和日本机器人学会自 1988 年起联合主办的年度国际会议,与 ICRA 并列为机器人学领域最重要的学术平台。它每年吸引数千名来自全球的学者和产业界代表,研究内容涵盖人工智能、机器人感知、导航、运动控制、人机交互、医疗与服务机器人等多个方向。IROS 在国际上享有极高声誉,曾于 2010 年获澳大利亚 ICT 会议排名的 A 级评价,并在 2012 年获巴西教育部的 A1 级(最高等级)评价。与 ICRA 相比,IROS 更强调系统整合与实际应用,不仅推动学术研究的发展,也促进技术落地与产业合作,长期以来在全球机器人领域具有深远影响。