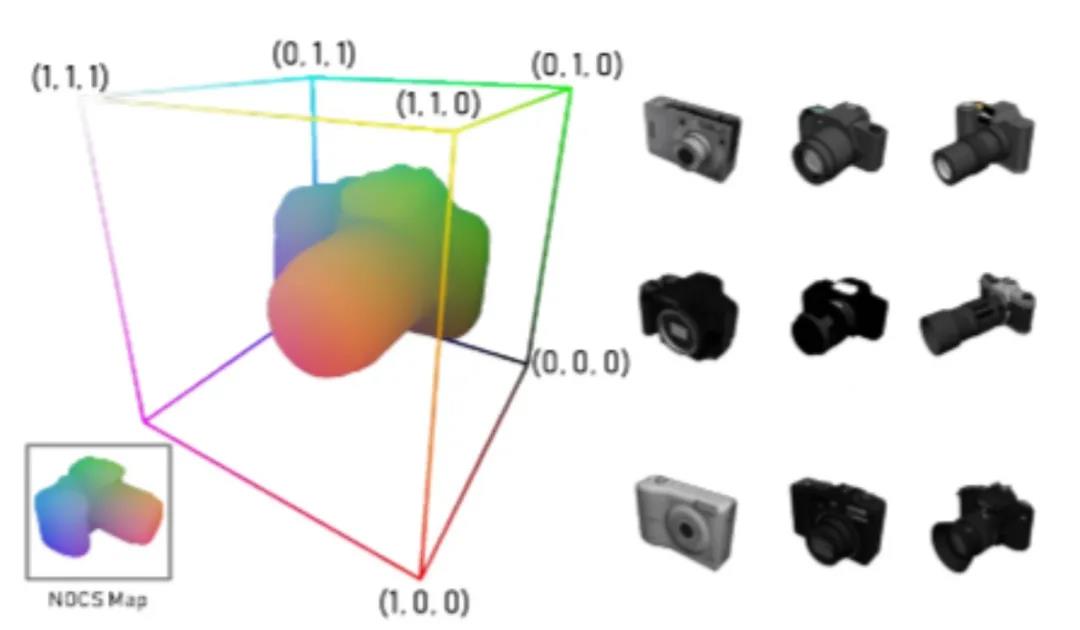
The 6Dof Pose, (including 3Dof Translation and 3Dof Rotation) is an important physical property to transform the object from the world coordinate system to the camera coordinate system, and the estimation and tracking of the 6Dof Pose is widely used in robot vision, grasping and control.
Overview
On October 22, AIR DISCOVER "Young Scientist Forum III" was held at Turing Lecture Hall, Institute for AI Industry Research, Tsinghua University (AIR). In this issue, we are honored to invite Prof. WANG He, Assistant Professor and PhD supervisor of Frontier Computing Research Center, Peking University, to introduce three papers on estimation and tracking of 6Dof Pose (including 3Dof translation and 3Dof rotation).
Read More: AIR DISCOVER| WANG He: Estimation and Tracking of 6Dof Pose