10月13日晚,第十五期DISCOVER LAB青年科学家论坛顺利开展。本期活动有幸邀请到清华大学机械工程系副教授赵慧婵,为我们线上做了题为Advances in High-Power-Density Dielectric Elastomer Artificial Muscles and their Applications(高功率密度介电弹性体人工肌肉及其应用进展)的精彩报告。本次活动由清华大学智能产业研究院(AIR)周谷越副教授主持。

赵慧婵副教授主要从事软体机器人、机器人高功率密度驱动技术、柔性传感器、智能假肢和外骨骼等方向的研究,获得了基金委优秀青年基金、共融机器人重大研发计划、面上项目、科技部重点研发计划、腾讯Roboics X lab犀牛鸟计划等项目支持。她的主要学术创新包括:(1)建立了高功率密度、长寿命介电人工肌肉的设计、制备和预处理工艺方法体系,提出了高效预测模型,实现了柔性致动一体化设计制造;(2)提出了基于弹性体材料的光波导传感方法,研制了高延展率光波导传感器,实现了软结构对力触、形变、弯曲的多模态高质量感知;(3)基于致动和感知技术,开发了智能假肢、微型扑翼飞行器、可穿戴触觉阵列、手部外骨骼、咽拭子采样机器人等多套原理样机。发表论文30余篇(包括Nature、Science Robotics两篇、Nature Communications、IEEE Transactions on Robotics (T-RO)、Advanced Functional Materials等),谷歌学术引用2400余次,目前担任IEEE Transactions on Robotics (T-RO)的副主编。
软体机器人的本体主要由可以承受大变形的软材料构成,可以连续地变形,具有极高的自由度,在狭小、杂乱的空间或极端环境下具有较强的适应能力。此外,在人机协作等领域内,软体机器人有望解决与人交互过程中的安全性问题。基于以上两个特点,软体机器人的研究与应用受到了广泛的关注。
什么样的驱动器才能够适应具有较强的环境适应能力、安全性高、鲁棒性强的下一代机器人?赵教授以介电弹性材料为切入点,通过对其各种特性的介绍和利用其制造的介电弹性驱动器的各种应用,全方位地回答了这个问题。
使用软材料构成,把其它形式的能源转换成我们可控的机械能,并对外做功的结构都可以称为柔性驱动器,又被称为人工肌肉。人工肌肉具有两个非常重要的衡量指标,一个是能量密度,另一个是功率密度。赵教授与合作者所研究的介电弹性驱动器同人类肌肉一样,是一种在能量密度和功率密度上都非常占优的驱动器。其结构如同三明治一样,通过一种可拉伸导体中间夹住一片弹性体,工作时通过对上下电极之间施加电场,从而使中间弹性膜在面向扩张,且在厚度方向收缩。
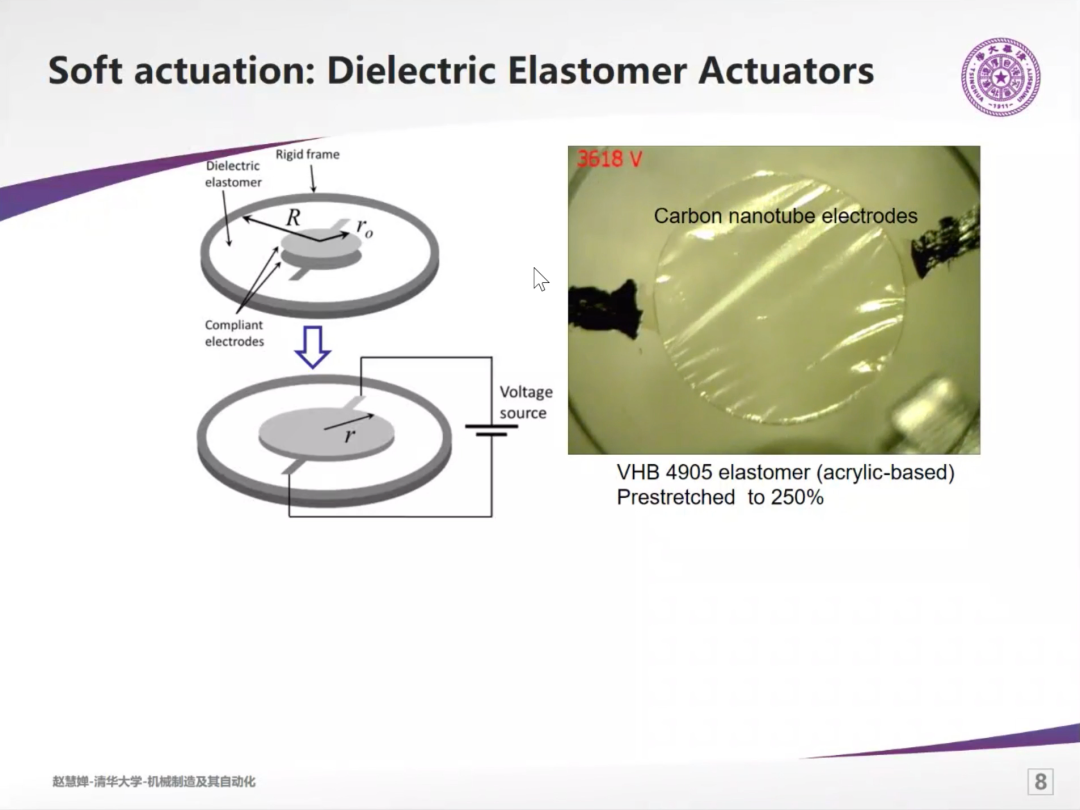
这种材料在实际应用中还面临着几个挑战:1.需要上千伏特电压才能驱动;2.器件的工作场强临近材料的击穿场强,这就导致如果结构中有瑕疵点就很容易被局部击穿,进而烧毁整个器件,导致电弹性驱动器寿命不高。3.目前还缺少规模化生产这种材料的技术。
面向以上挑战,赵教授及其研究团队设计开发了一个小型的直线介电弹性驱动器。该驱动器通过对介电弹性材料进行多层堆叠后进行卷绕,形成一个圆柱结构。一方面,这种结构通过减小层厚的方式可以降低电压。另一方面,结构可以输出沿着轴向的直线运动,较容易与其它运动进行转换。
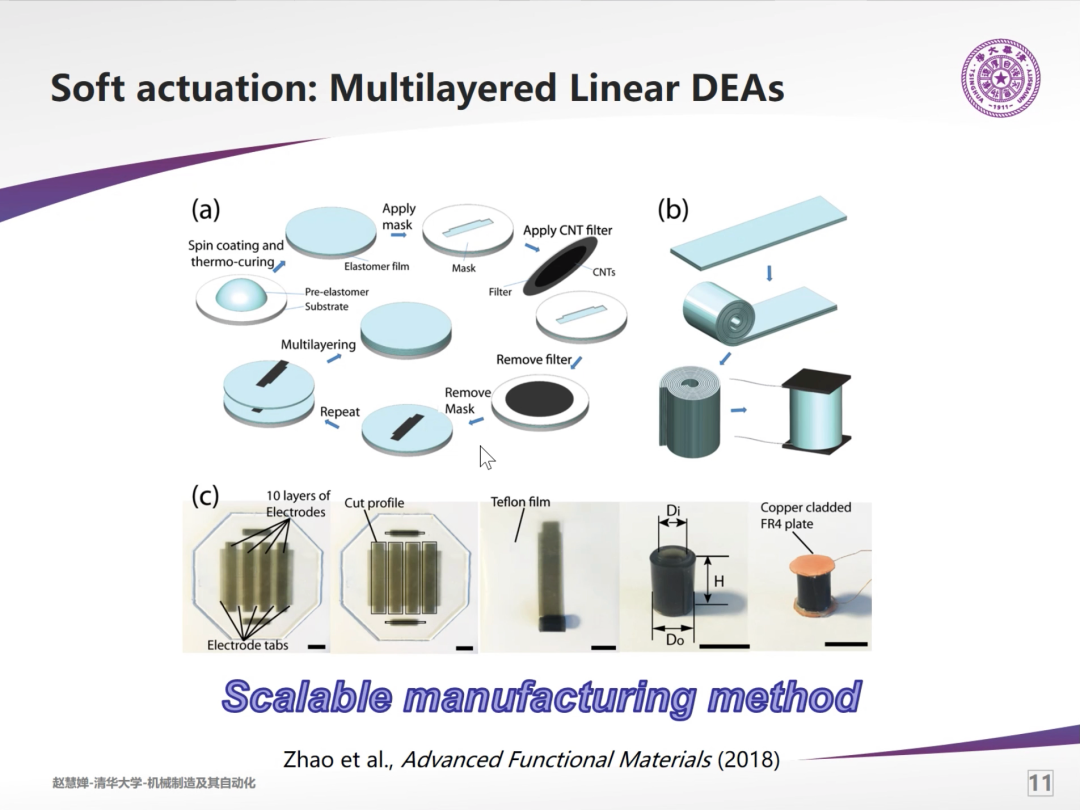
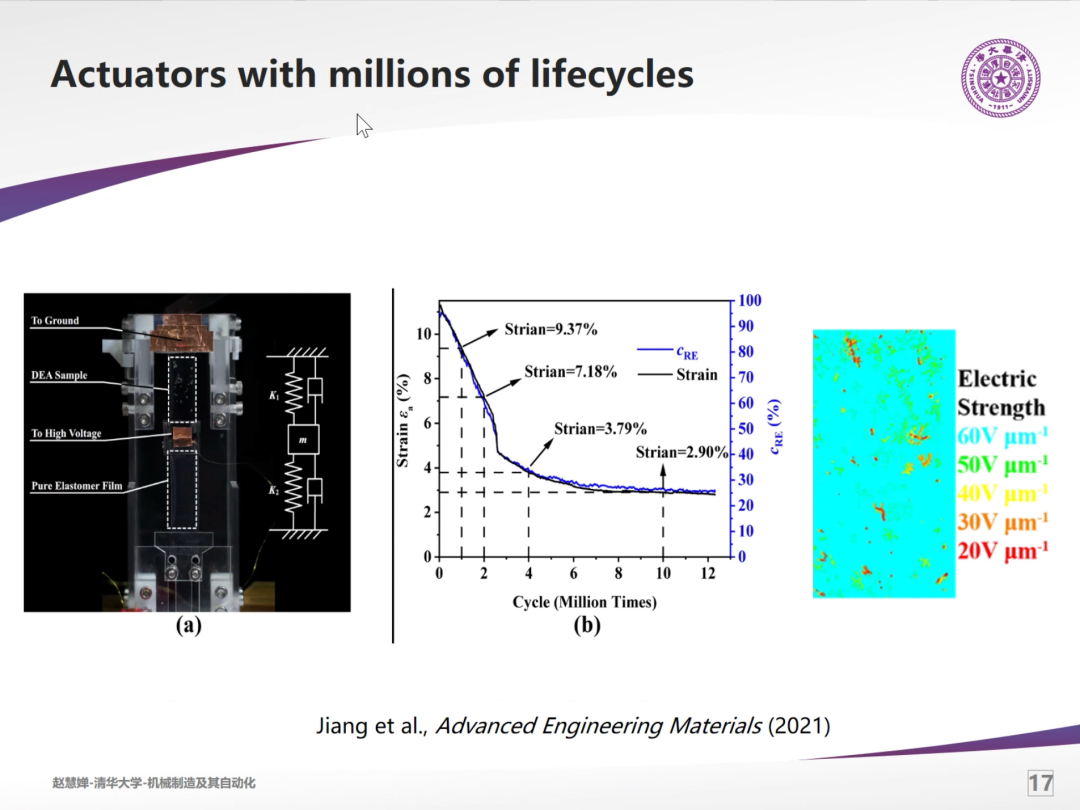
为了解决介电弹性材料寿命短的问题,赵教授及其研究团队利用了碳纳米管可拉伸电极的自清理效应,来清理制备过程中的瑕疵点。由于自清理特性的存在,介电弹性材料就可以将存在瑕疵点的区域清理出来,从而保证了介电弹性材料的长寿命。为了监测这个驱动器的寿命,赵教授团队进行了驱动器1200万次的循环实验。实验结果表明在100万次的时候,驱动器的驱动力仍保持在初始的80%以上。
第一个应用是一个柔性可穿戴设备。通过将柔性驱动器嵌入到手臂的套环里面,从而在手臂的不同的点产生不同的震动。然后人通过一定的训练就可以将震动的不同位置、频率、幅度组合起来进行解析,进而实现信息的传递。未来如果将这个器件规模化,驱动器产生的排列组合就可以传递大量的信息。

第二个应用是利用介电弹性驱动器制造一款扑翼飞行器,通过一个微型柔性铰链四连杆,把直线运动转换成翅膀往复运动,从而实现扑翼的扇动。

柔性材料因为自由度很高,会出现不可控的运动。比如在某些频率下,介电弹性驱动器不再输出直线运动,而变成了一个动态的弯曲运动,不再向翅膀方向传递力了,对介电弹性驱动器进行了机械限制,可以克服该问题,进而通过增加电压提升翅膀产生的升力,最终达到克服重力的水平,实现起飞。
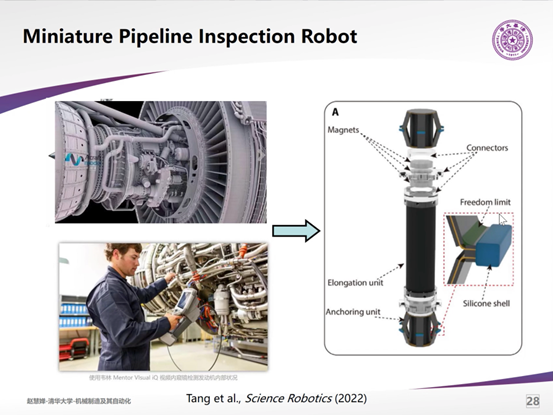
第三个应用是利用介电弹性驱动器制造一个微型机器人进行管道探测。赵教授及其研究团队根据航空发动机外部管道的特点设计了一种仿蚯蚓蠕动的机器人。该机器人中间有伸缩单元,前后有锚固单元。机器人通过交替锚固和周期性伸缩实现一步一步向前挪动。
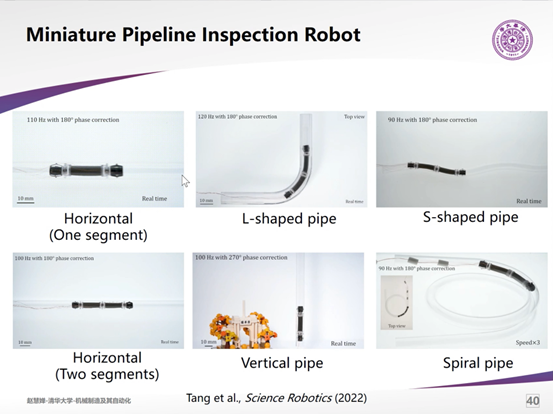
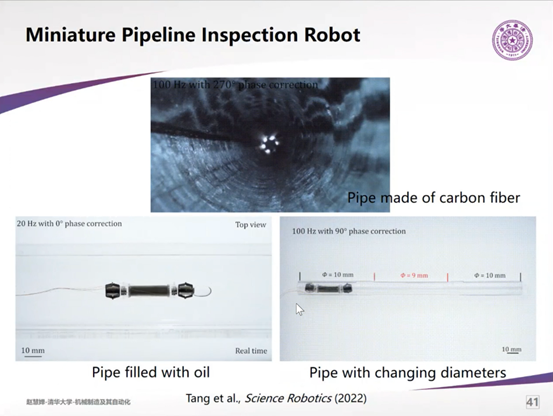
由于其本身是柔顺的,所以即使没有专门去设计一些转弯的结构,该机器人依然在L弯、S弯和环形弯等管道曲折处表现出良好的通过性。在一些极端情况下,例如管道中存在油脂、冷却液或者燃料,管道内径发生变化,管道材质发生变化情况下,都表现出良好的适应性。
在最后的问答环节中,赵教授与线上线下与会老师和同学对报告所涉及的领域进行了激烈的探讨,并对同学们所提出的问题一一给出了耐心的回答和指导意见,她认为从长远来看,柔性人工肌肉具有巨大的发展潜力。
文稿撰写 / 刘冠洲
排版编辑 / 王影飘
校对责编 / 黄 妍



