ARX 6: An Open Source Wheel-legged Mobile Manipulator for Robotic Research and Education
Yufei Jia1, Haizhou Zhao2, Zhengxiao Han3, Xinliang Zhang1, Pengfei Huang1, Guyue Zhou1
1Tsinghua University 2 Xi'an Jiaotong-Liverpool University 3 Beijing University of Chemical Technology
Demo Video
Abstract
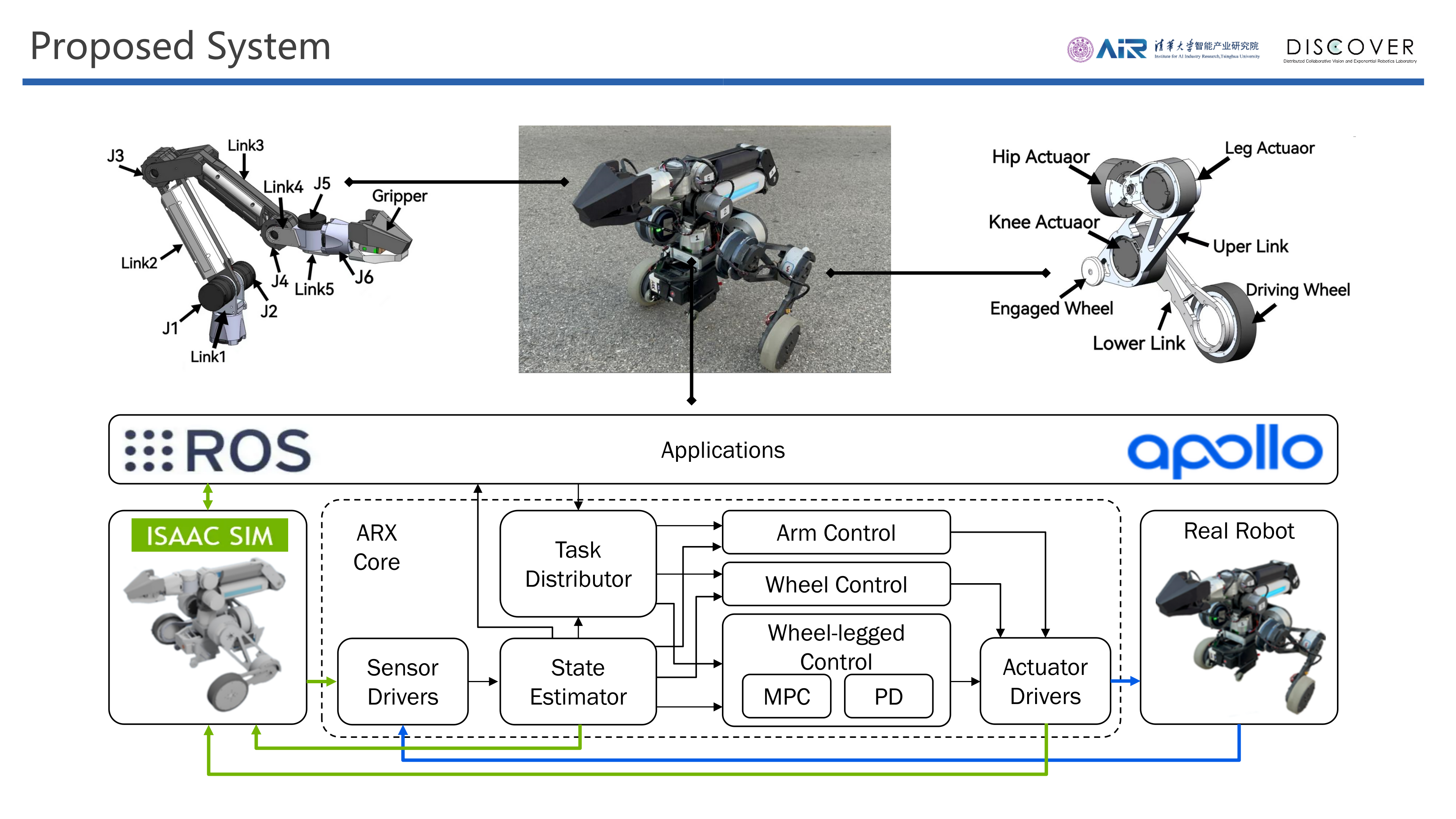
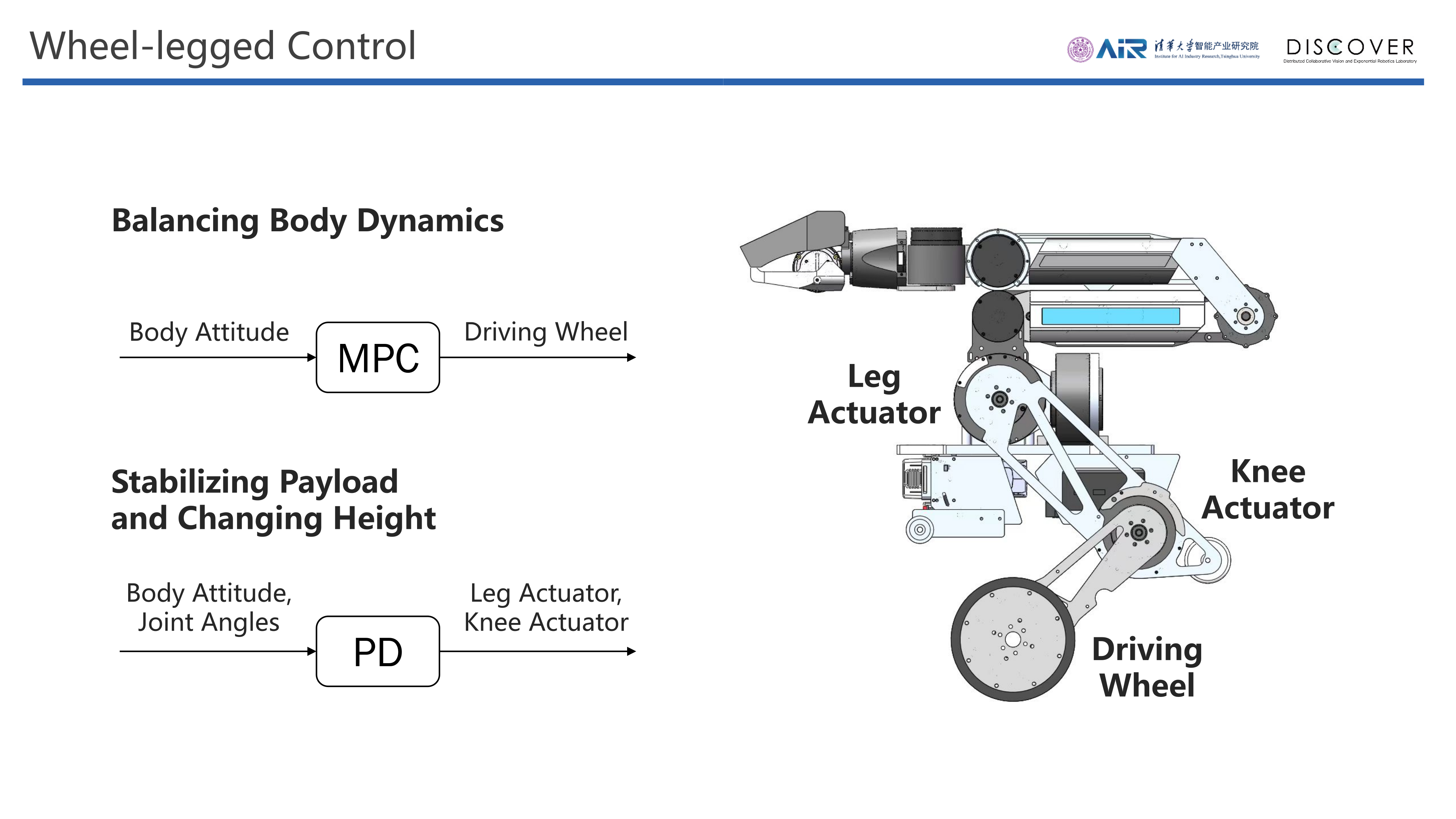
As a feasible solution to ensuring both driving efficiency and passing ability, wheel-legged robots have become increasingly popular in robotics research community. This paper introduces an open source mobile manipulator with wheel-legged locomotion - the ARX 6, which is dedicated to robotic research and education. Firstly, tailored mechanical design guarantees agile manipulation and multi-terrain mobility with simple dynamic control models. Secondly, our software framework supports deploying algorithms in the real-time simulation and the real world simultaneously, which greatly improves the sim-to-real adaption efficiency. Lastly, the hardware capability and the software compatibility are demonstrated by diversified field experiments including fundamental motion control, multi-terrain navigation, mobile manipulation, and lowspeed autonomous driving. These results collectively represent a ready-to-use mobile manipulation platform capable of conducting generalized research and education with a dynamic leg-wheeled locomotion.
Details
Resource
The project package including mechnical models, simulation configuration files and source codes.
Download